|
|
Reifen |
Aktive Raddrehzahlsensoren
|
Aktive Raddrehzahlfühler mit eigener
Auswerteelektronik
auch: AMR-Sensor (Anisotroper Magnetoresistiver
Effekt)
Der Rad-Drehzahlsensor
(Abk.: DF =
Drehzahlfühler) wurde
zuerst für den Einsatz im
Antiblockiersystem (ABS)
entwickelt.
Anfänglich
handelte es sich um einen passiven induktiven Sensor
(Induktivgeber). Mittlerweile hat aber der
aktive Sensor mit eigener
Auswerteelektronik immer mehr an Bedeutung gewonnen.
Positiver
Nebeneffekt: Die Rad-Drehzahlinformationen können auch von via
CAN-Bus von Getriebe-, Motor-,
Navigations- und
Fahrwerksregelsystemen genutzt werden.
Bei Audi werden neuerdings die Signale z.B. für die
Radlöseerkennung genutzt. |
Funktionsweise und Messprinzip
Dieser Sensor arbeitet nach dem
Hall-Prinzip und hat die Besonderheit, dass
er Vorwärts
-
und
Rückwärtsbewegungen erkennt.
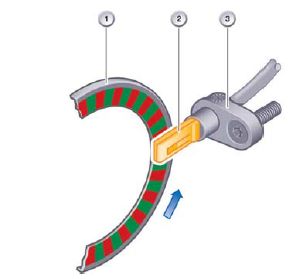
1 Geberring, 2 Sensor IC mit Hallsensor, 3 Sensorgehäuse |

Drehzahlsensor von Bosch |
Die Drehrichtungserkennung ist durch den internen
Signalversatz von drei entsprechend angeordneten Hallelementen im Sensor
möglich. Bei einem solchen Raddrehzahlsensor übernehmen Magnete die
Funktion der Zähne des Inkrementenrades. Die Magnete sind in Nordpol und
Südpol unterschieden und sind wechselweise auf einen Polring (Geberring)
angeordnet.
Anders als beim passiven Raddrehzahlsensor wird der aktive Raddrehzahlsensor mit
einer definierten Spannung versorgt und liefert schon ein im Raddrehzahlsensor
erzeugtes Rechtecksignal in Form eines
Datenprotokolls zum Steuergerät. Dieses Datenprotokoll wird als Stromsignal im
Pulsweitenmodulationsverfahren (PWM) übertragen.
Der aktive Sensor
liefert ein
Signal mit
drehzahlunabhängiger
konstanter Amplitude und nutzt bei der
Detektierung des Drehzahlsignals den
Hall-Effekt aus.
Der Drehzahlsensor kann das Drehzahlsignal
von ferromagnetischen Zahnrädern, Stanzblechen oder
von Rädern mit aufgebrachten Multipolen
detektieren.
Bei der Verwendung von Zahnrädern oder
Stanzblechen ist ein Arbeitsmagnet hinter
dem Messelement eingesetzt.
Die Anwendung dieses
Messprinzips ermöglicht eine Geschwindigkeitsmessung (Wegstreckenmessung) bis v
= 0,1 km/h. Damit sind auch die teilweise
schärferen vmin-Bedingungen von z.B.
Navigationssystemen, Rückrollsperren,
Einparksystemen, usw. abdeckbar.
Signalverarbeitung
Bei dem Stromsignal handelt
es sich um einen 14 mA
-
Pegel und um einen 7 mA
-
Pegel. Letzterer dient als Auswerteinformation für den
Fehlerspeicher. Der 14 mA
-
Pegel dient als
Informationssignal.
In der Breite des
Rechteckimpulses und dem Abstand zwischen einem Impuls sind mehrere
Informationen für das Bremsensteuergerät beinhaltet.
|
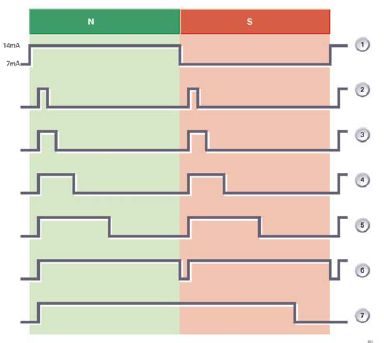
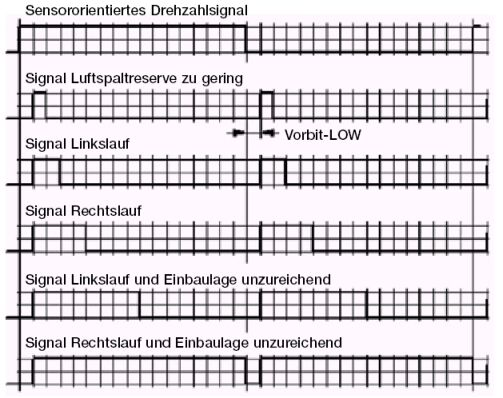
Signalbilder Drehzahlsensor |
1
sensorinternes Signal
2
Luftspaltreserve zu gering
3
Laufrichtung
A
4
Laufrichtung
B
5
Montagegrenzposition A
6
Montagegrenzposition B
7
Stillstandssignal
(Erklärungen im weiteren Verlauf) |
Für die
Signalübertragung wird eine
Zweidraht-Stromschnittstelle verwendet.
Versorgt wird der Sensor durch die
Bordnetzspannung. Im
Steuergerät wird der vom Sensor kommende
Strom an einem Messwiderstand
RM in ein Spannungssignal gewandelt.
Die Auswerteschaltung erkennt an der Größe der
Spannung, ob ein High- oder
Low-Signal vorliegt.
Arten von
aktiven Drehzahlgebern:
|
DF11s
/ DF11sM
Rechtecksignal
als Drehzahlsignal
Drehzahlsignal
(DZ) - ein der Radgeschwindigkeit
proportionales Frequenzsignal.
Für DF11s -
magnetisches Multipolrad. Für DF11sM - Zahnräder
oder Stanzbleche.
Drehzahlsensor-Ausgangssignal bei rotierendem Impulsrad. Das Signal ist
ein Rechtecksignal mit konstanter Amplitude, und die Frequenz ist
proportional der Radgeschwindigkeit.
 |
|
DF11i
/ DF11iM
Rechtecksignal
mit Zusatzinformationen, die im
Pulsweitenmodulations-Verfahren (PWM)
übertragen werden. Die Breite des
Rechteckimpulses beinhaltet die Zusatzinformation,
während der Abstand zwischen
einem Puls und des übernächsten
Pulses die Drehzahlinformation darstellt.
Drehzahlsignal
(DZ) - ein der Radgeschwindigkeit
proportionales Frequenzsignal.
Stillstandserkennung
(STOP) - steht das Fahrzeug länger als etwa 1 Sekunde bzw.
wird die Stromversorgung eingeschaltet,
so sendet der Drehzahlsensor etwa jede
Sekunde einen Stillstandsimpuls aus. Über
diesen Impuls lässt sich der ordnungsgemäße Zustand des Drehzahlsensors
bei Stillstand überwachen.
Drehrichtungserkennung
(DR) - gibt die Drehrichtung (rechts/ links)
des Rades in Bezug auf die Sensoreinbaulage
an.
Luftspaltreserve
(LR) - gibt an, ob die magnetische
Feldstärkeänderung unter einem für die
fehlerfreie Funktion notwendigen Wert liegt.
Einbaulagenerkennung
(EL) - gibt an, ob die magnetische
Feldstärkeänderung ausreichend ist, um die
Funktion mit großer Sicherheit zu
gewährleisten. Das Einbaulage-Signalbit wird
nur bis etwa
20km/h ausgegeben.
Für DF11i -
magnetisches Multipolrad, für DF11iM - Zahnräder oder Stanzbleche.
Hinweis: Die
Abkürzung M steht für eingebauter Magnet und
i bedeutet intelligent. Der DF11i beruht
ebenso wie der DF 11s auf dem Hall-Messprinzip. Er verwendet lediglich
eine andere Auswerteschaltung.
Drehzahlsensor-Ausgangssignal bei rotierenden
Impulsrad. Das Signal ist mit
unterschiedlichen Zusatzinformationen
kodiert im PWM-Verfahren.
 |
In der folgenden Bauausführung erzeugt der Permanentmagnet im Raddrehzahl
-
Sensor ein Magnetfeld. Die Feldlinien des Magnetfeldes verlaufen im rechten
Winkel zur Sensorschicht auf dem Sensorelement. Die Ablenkung der Feldlinien
durch das Inkrementenrad verursacht Widerstandsänderungen in der dünnen
ferromagnetischen Schicht des Sensorelements. Die absolute Stärke des externen
Feldes hat kaum noch Einfluss auf das Messsignal.
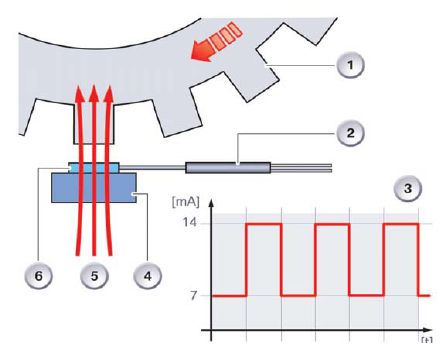
schematische Darstellung |
1
Inkrementenrad
2
Auswerteelektronik
3
Signaldarstellung
4
Permanentmagnet
5
Magnetfeldlinien
6
Sensorelement
|
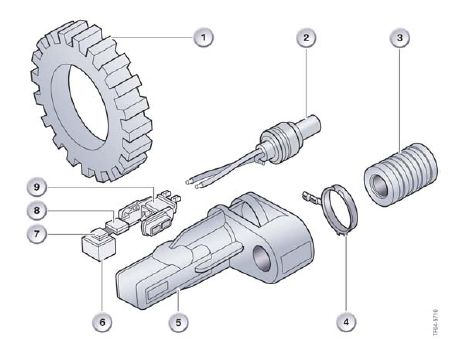
Explosionsdarstellung |
1
Inkrementenrad
2
Sensorkabel
3
Befestigungsteil
4
Kontaktring
5
Sensorgehäuse
6
Permanentmagnet
7
Sensorelement
8
Auswerteelektronik
9
Sensorträger
|
Unterschiede
zwischen aktiven und passiven Raddrehzahlsensoren:
Aktiver Sensor
|
Passiver induktiver Sensor
|
|
Störsicherheit |
| Der
aktive Sensor ist im Steuergerät mit z.B. 115
Ohm abgeschlossen. Das Sensorsignal ist über
der Frequenz konstant und hat eine
Signalleistung von 5 mW. Störungen, die
Auswirkungen im System
haben, müssen Leistungen einkoppeln,
die über diesem Wert liegen. Der Sensor
kann durch die Einkopplungen gestört werden.
Die Auswerteschaltung ist aber
durch den Messwiderstand besser geschützt, als beim
induktiven Sensor. |
Der induktive
Sensor ist im Steuergerät hochohmig
abgeschlossen.
Das Sensorsignal ist erst bei höheren
Frequenzen ausreichend groß, so dass es
durch einen Tiefpass bedämpft werden kann. >
Daraus ergibt sich, dass schon Störsignale
mit wenigen 100 µW als Nutzsignal erkannt
werden können und
so die Steuergeräte - Auswerteschaltung
durch Einkopplungen stören kann. |
|
Ausgangssignal in Abhängigkeit der Raddrehzahl und des Luftspaltes |
|
Bei aktiven
Sensoren können Signale bis zu 0,1 km/h
ausgewertet werden. |
Bei induktiven
Sensoren kann erst ab einer bestimmten
Raddrehzahl eine
Auswertung erfolgen. Die Signalamplitude
ist abhängig von der Raddrehzahl
(Frequenz) und des Luftspaltes. |
|
Prüfverfahren im Kundendienst |
|
Beim aktiven
Drehzahlsensor kann der Innenwiderstand nicht
mit einem Multimeter geprüft werden, sondern
es
kann nur eine Spannungsprüfung bei
angeschlossenem Steuergerät erfolgen.
Dabei liegt die
Ausgangsspannung des Steuergerätes im
Ruhezustand bei ca. 8V und die
Signalamplitude muss sich bei
drehenden Rad ändern. |
Prüfung mit
Multimeter (Ohmmeter und Spannungsmessung) möglich |
Magnetoresistiver Drehzahl-Sensor
(AMR-Sensor)
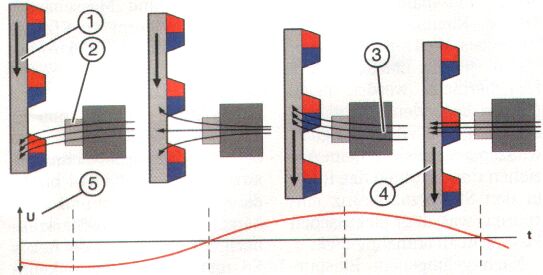
1 = Polrad, 2 = Sensor, 3 = Feldlinien, 4 =
Bewegungsrichtung, 5 = Spannungsverlauf zur Polradstellung
Das folgende Signalbild eines AMR-Sensors,
aufgenommen von Reinhold Dörfler, zeigt ein Gutbild und ein
Fehlerbild eines AMR-Sensor.
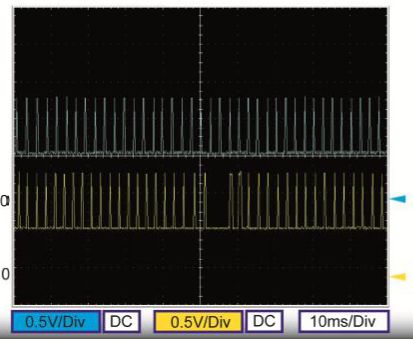
Quelle:
Dörfler Signalbilder
Das gelbe Signal zeigt ein Fehlerbild, wenn der
AMR-Sensor verschmutzt ist, beispielsweise ein Span am Geberrad, das
blaue Signal ist das Referenzbild (Gutbild).
Beim Radwechsel von
Sommer auf Winter oder von Winter auf Sommer wird das Nachziehen der
Räder nach z.B. 50 km nicht immer eingehalten. Wenn sich die Schrauben
nicht richtig gesetzt hatten, kann es u.U. zu einem Lösen der
Radschrauben mit im schlimmsten Fall bösen Folgen kommen. Um dies
auszuschließen gibt es nun die
Radlöserkennung bzw. Radlösewarnung
von Audi. Die Radlösewarnung wurde erstmalig im neuen Audi A8 als
Serienausstattung angeboten.
Hintergrund: Ein loses
Rad erzeugt Vibrationen, die sich auf das Fahrzeug übertragen. Diese
Vibrationen werden mit Hilfe der
Raddrehzahlsensoren erkannt. Durch eine spezielle
Analyse der
Raddrehzahlsignale kann auf ein loses Rad geschlossen
werden. Die genaue Funktionsweise dieses Analysemechanismus bleibt das
Betriebsgeheimnis von Audi.
Quelle: Bosch (Informationen
für Lehrkräfte), Herr Papert (Bosch), Akademiebericht Dillingen, VW, Audi,
Reinhold Dörfler,
Autor Johannes
Wiesinger
bearbeitet:
Folgen
Sie kfztech auf Twitter

Besuchen Sie kfztech auf Facebook

Lesen Sie auch den Blog von kfztech.de

|
|