![]()
| kfztech.de | Kfz-Technik | Abkürzungs-ABC | Auto Infos | kfztech TV | Unterricht und Ausbildung |
Warum CAN-Bus?Elektronische Systeme im Kfz haben in den letzten Jahrzehnten rasant zugenommen. Es gibt inzwischen einen großen Anteil an Elektronik und dafür weniger Mechanik. Dies wird auch durch den vor wenigen Jahren geschaffenen Beruf des Kfz-Mechatronikers ausgedrückt, der den bisherigen Kfz-Mechaniker abgelöst hatte. Ständig steigende Anforderungen an Fahrsicherheit, Abgasverhalten und Kraftstoffverbrauch erfordern einen zunehmenden Austausch von Informationen zwischen den Steuergeräten bzw. eine immer umfassendere Zentralelektronik. etoro copytrader erfahrungen
CAN Bus ganz einfach!Das Handbuch wurde für Einsteiger in die CAN-Bus Technik entwickelt. Es beschreibt auf einfache Art nur die notwendigsten Begriffe und Testmöglichkeiten an einem CAN-Bus incl. Fehlersuchstrategie.Ideal als Begleitheft zu bestehenden Schulungen in der Ausbildung geeignet.
Da bei
einer herkömmlichen Verkabelung für jede Information je eine Leitung
benötigt wird, steigt mit zunehmendem Funktionsumfang der Kfz-Elektronik die
Länge und das Gewicht des Kabelbaumes sowie die Anschlüsse an den
Steuergeräten. Abhilfe schafft hier der
CAN-Bus, der sämtliche Informationen über
lediglich zwei Leitungen überträgt. Datenbusse, auch
CAN (Controlled Area Network)
genannt, verbinden bis zu 100 verschiedene
Steuermechanismen miteinander, die unter der Motorhaube eines Wagens
zusammenspielen.
Einfach ausgedrückt können
sich die angeschlossenen Steuergeräte über die Leitungen „unterhalten“ und
gegenseitig Informationen austauschen.
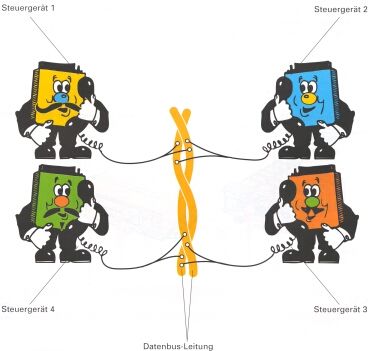
Beim Bus-System funktioniert die Datenübertragung
ähnlich wie bei einer Telefonkonferenzschaltung. Im Kraftfahrzeug sind die einzelnen
Steuergeräte miteinander vernetzt. Bei der Telefonkonferenz "spricht" ein
Teilnehmer (Steuergerät) seine Informationen (Daten) in das Leitungsnetz
hinein, während die anderen Teilnehmer diese Informationen "mithören" .
Einige Teilnehmer finden diese Informationen
interessant und werden sie nutzen. Andere Teilnehmer wiederum nicht.
Dadurch können komplexe
Systemfunktionen erreicht werden, wie z.B. bei Schaltvorgängen eines
automatischen Getriebes. Der
CAN
ist ein 2-Draht-Bussystem
(Twisted Pair) und kann trotz des einfachen Aufbaus sehr große Netzwerke mit bis
zu 100 Steuergeräten bilden. Die Datenübertragung erfolgt seriell in
Datenpaketen, deren Aufbau standardisiert ist. Die Vorgänge bei der Übertragung,
der Fehlersicherung, der Fehlerkorrektur und der Bestätigung sind genau
festgelegt und in der CAN-Spezifikation (Bosch) beschrieben. Bussysteme ermöglichen eine deutliche
Reduzierung von Kabeln und Steckern. Preis und Gewicht sinken dadurch.
Es entsteht eine Erweiterte Kommunikationsfähigkeit, die durch eine einfache
Verkabelung nicht möglich wäre. Durch Diagnosekomponenten ist eine ständige
Kontrolle vorhanden. Ein Protokoll erkennt Übertragungsfehler, die zum Beispiel
aufgrund elektromagnetischer Einstrahlung entstehen können, und korrigiert sie
automatisch durch Sendewiederholung. Sicherheit ist somit auch durch Redundanz
gegeben. Modularisierung z.B. von Steuergeräten senkt ebenfalls den Preis, da
Steuergeräte häufig nur entsprechend programmiert werden müssen. In zunehmendem Umfang werden inzwischen auch
Sensoren (z.B. Lenkwinkelsensor) und Aktoren (z.B. Wischermotor VW) mit
Prozessoren ausgerüstet, um die Daten aufzubereiten. Wenn die Daten solcher
intelligenter Komponenten direkt auf das Bussystem gelangen, belasten sie die
Steuergeräte nicht mit der Weiterleitung. Im Diagnosebereich wird der CAN-Bus
für die Übermittlung der Zustände und Fehlerspeicher genutzt, sowie für die
Flash-Programmierung der Steuergeräte.
Die Vorteile der linearen CAN-Bus-Topologie auf einen Blick:
kleinerer Kabelbaum, der
Verkabelungsaufwand ist gering Als Übertragungsmedium
dient eine preiswerte und einfach zu handhabende verdrillte
Zweidrahtleitung. Sensoren mehrfach nutzbar CAN-Stationen können
nachträglich relativ einfach in den bestehenden CAN-Bus eingefügt und
entfernt werden. Es muss lediglich die Verbindung zur Busleitung
hergestellt bzw. getrennt werden. Dieser Aspekt spielt besonders bei
der Fehlersuche und Reparatur ein bedeutende Rolle
Der Ausfall einer CAN-Station hat keine unmittelbaren Auswirkungen auf
den CAN-Bus. Alle anderen Stationen können weiterhin uneingeschränkt
kommunizieren.
Die
Nachteile
dieser Bustopologie wirken sich wie folgt auf den CAN-Bus aus:
Geschichtliche Entwicklung des CAN
1987 Erster CAN Chip von INTEL seit 1989 Serienbausteine für den Einsatz im Fahrzeug Seit 1992 wird CAN in der Mercedes S-Klasse eingesetzt, später folgten auch andere Automobilhersteller. Mit der Zeit haben sich unterschiedliche Autobusprotokolle herausgebildet wie z. B. CAN, VAN, J1850, ABUS. VAN und ABUS-Protokolle sind inzwischen zugunsten von CAN aufgegeben worden. Seit 1994/95 ist CAN das am meisten verbreitete Protokoll für Automobilanwendungen. 2001 Auch bei Kleinwagen wird der
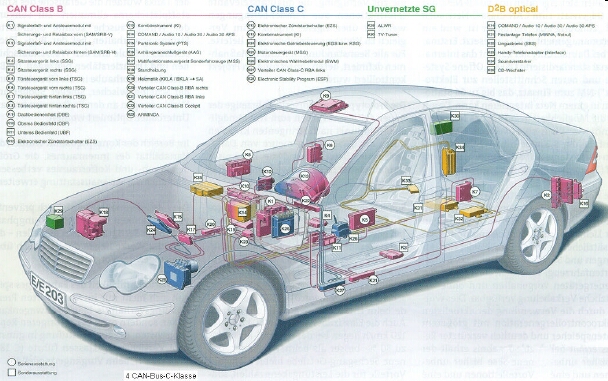
CAN-Bus im Triebstrang und im Karosseriebereich eingesetzt. 2003 Audi setzt im neuen A8 die aus der GSM-Technologie bekannte Bluetooth-Schnittstelle zur drahtlosen Übertragung zwischen der Telematikeinheit und dem mobilen Bedienhörer ein. CAN KlassenAktuelle Kraftfahrzeuge vernetzen bereits eine große Zahl von Steuergeräten miteinander, die unterschiedliche Anforderungen mit sich bringen. Daher werden im Kfz mehrere CAN-Bussysteme verbaut. Diese unterscheiden sich vor allem in der Übertragungsgeschwindigkeit und werden in drei Klassen eingeteilt.
Verschiedene Bussysteme im VergleichDie in modernen Kraftfahrzeugen eingesetzten Komponenten stellen unterschiedliche Anforderungen an das eingesetzte Bussystem. Beispielsweise erfordert der Einsatz im Bereich des Motormanagements eine schnelle Datenübertragung, eine Klimaanlage hingegen muss nicht innerhalb von Sekundenbruchteilen auf Änderungen der Temperatur im Fahrgastraum reagieren. Hier können deutlich höhere Verzögerungszeiten in Kauf genommen werden. Zumeist werden verschiedene und unterschiedlich schnelle Bussysteme in einem Kfz eingesetzt. Der Antriebsbus (z.B. Powertrain-CAN) umfasst die Motor-, Getriebe- und Bremsen-Steuergeräte sowie weitere direkt damit zusammenhängende Sensoren/Aktoren. Er ist ein Highspeed-CAN. Über einen Komfort-CAN oder einen Karosserie-CAN laufen Komfortsysteme wie Fensterheber, Sitzmemory oder Reifendruck. Einfache Anwendungen wie Klimaanlage oder Wischersteuerung nutzen häufigen einen Eindraht-Bus (LIN). Im Infotainmentbereich werden auf Grund der großen Datenmengen MOST Busse mit Lichtwellenleitern eingesetzt. In einem oder auch mehreren zentralen Modulen (Gateways) laufen die Informationen zusammen und werden auf das jeweilige Bussystem "abgestimmt". Die Daten werden auch von einem ins andere CAN-System weitergeleitet. Gateways können für Diagnosezwecke abgefragt werden.
Weitere Bus-Systeme
Bustopologie CAN und andere Bussysteme
Die Teilnehmer sind durch kurze Stichleitungen mit einer Hauptleitung verbunden. Jede Kommunikation läuft über diese Hauptlinie. Wird diese unterbrochen, so entstehen zwei Segmente, die meist noch funktionsfähig bleiben. Diese lineare Topologie wird auch "Bustopologie" genannt. CAN arbeitet standardmäßig mit einer linienförmigen Topologie.
Die Baumtopologie zeichnet sich durch Verzweigungen an beliebiger Stelle aus. Dadurch sind flexible Kombinationen aus Stern- und Linientopologie möglich.
Kennzeichnend sind die Punkt-zu-Punkt-Verbindungen zwischen den Teilnehmern. Alle Verbindungen sind zu einer geschlossenen Kette angeordnet. Die Kommunikation kann nur in einer Richtung erfolgen. Ein Befehl von Gerät A zum Gerät B muss meistens über ein anderes Gerät laufen. Fällt eine Teilstrecke aus, ist meist das gesamte System funktionslos. Über eine Diagnoseleitung kann der Fehler lokalisiert werden. z.B. Bei MOST Bussystem
Hier gibt es einen zentralen Knotenpunkt, an dem alle Teilnehmer angeschlossen sind. Jeder Teilnehmer hat seine eigene Leitung. Fällt der zentrale Punkt aus, so bricht die gesamte Kommunikation zusammen. z.B. bei Byteflight - Weitere Einzelheiten zum CAN:CAN-Antrieb
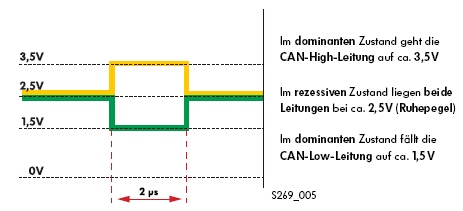
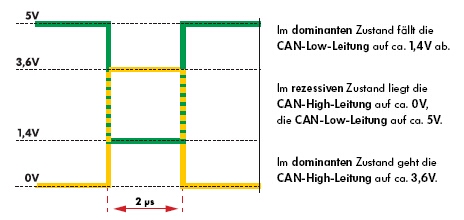
Die Bus-Struktur des PT-CAN unterscheidet sich durch die dritte Leitung. Diese dient lediglich als Wake-up-Leitung, die die Steuergeräte aus dem Sleep-Modus (Stromsparbetrieb) in den normalen Betriebszustand bringt. Der CAN-Datenbus Antrieb (VW) wird mit Klemme 15, bzw. nach kurzer Nachlaufzeit abgeschaltet. Spannungsänderungen auf den
CAN-Leitungen bei Wechsel zwischen dominantem und rezessivem
Zustand am Beispiel des CAN-Datenbus Antrieb: Im Ruhezustand liegen beide Leitungen
auf dem gleichen voreingestellten Wert von 2,5 V. Dieser
Ruhepegel wird auch als rezessiver Zustand bezeichnet. Im
dominanten Zustand steigt die Spannung auf der
CAN-High-Leitung um mindestens 1V an. Die Spannung auf der
CAN-Low-Leitung fällt um mindestens 1V. Daraus ergibt sich,
dass beim CAN-Datenbus Antrieb die Spannung auf der
CAN-High-Leitung im aktiven Zustand auf mindestens 3,5V
ansteigt (2,5V + 1V = 3,5V). Die Spannung auf der
CAN-Low-Leitung fällt dann auf noch maximal 1,5V ab (2,5V -
1V = 1,5V). Demnach beträgt die Spannungsdifferenz zwischen
CAN-High und CAN-Low im rezessiven Zustand 0V sowie im
dominanten Zustand mindestens 2V.
|
|||||||||||||||||||||||||||||||||||||||||||||
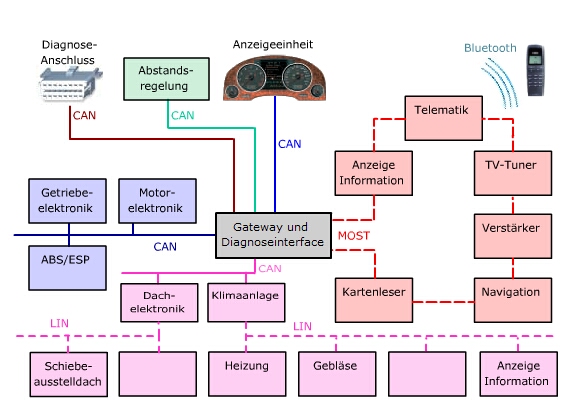




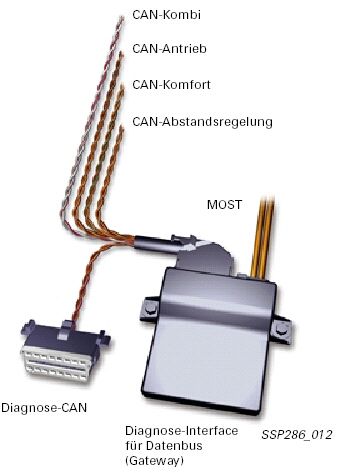
Die einzelnen Bussysteme senden ihre Daten an das Gateway. Dieses stellt sicher, dass die systemübergreifenden Daten, obwohl sie unterschiedliche Kommunikationsstrukturen und Geschwindigkeiten haben, im ganzen Systemverbund zur Verfügung stehen. Beim Ausfall eines Bussystems oder bei der Weiterleitung von Daten erfüllt es zusätzlich die Aufgaben eines Filters. Es ist in der Lage, Störungen und Datenmengen zu filtern. Manche Kfz besitzen mehrere Gateways. Oft befindet sich ein Gateway im Kombiinstrument.Der Gateway Diagnose-CAN dient dem Datenaustausch zwischen dem Diagnosegerät und der im Fahrzeug verbauten Steuergeräte. Die früher verwendeten K- oder L-Leitungen entfallen mit Ausnahme abgasrelevanter Steuergeräte.Durch die schnelle Datenübertragung über CAN und durch das Gateway selbst, ist das Diagnosegerät in der Lage, direkt nach Anschluss an das Fahrzeug einen Überblick über die verbauten Komponenten und deren Fehlerstatus anzuzeigen.Der Diagnose-CAN nutzt eine ungeschirmte verdrillte Zweidrahtleitung mit einem Querschnitt von je 0,35 mm2. Die CAN-High-Leitung ist bei VW orange/violett, die CAN-Low-Leitung ist orange/braun. Die Datenübertragung erfolgt mit einer Übertragungsgeschwindigkeit von 500 KBit/s.Über den OBD-Stecker besteht die Möglichkeit, auf den CAN - Bus zuzugreifen. |
|
Pin-Belegung an der Diagnosesteckdose (SAE 1962)
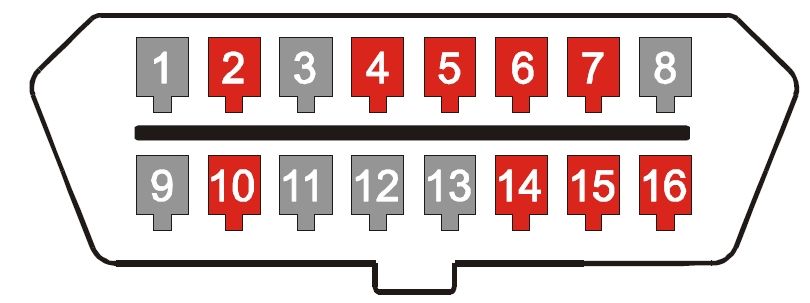 |
Pinbelegung: 2+10 Datenübertragung nach SAE J 1850 (USA) ISO 9141-2 (Europa), 4+5 Fahrzeugmasse und Signalmasse, 6+14 Datenübertragung CAN High und Low, 7+15 Datenübertragung nach ISO 9141-2 (Europa) auch K und L Ausgang, 16 Batterie Plus (Kl. 15 oder 30)
Quellen: VW, BMW, Mercedes, Opel, Multiplikator Lehrgang, BTZ Ingolstadt
Autor: Johannes Wiesinger
| Impressum, Copyright |