![]()
| kfztech.de | Kfz-Technik | Abkürzungs-ABC | Auto Infos | kfztech TV | Unterricht Ausbildung |
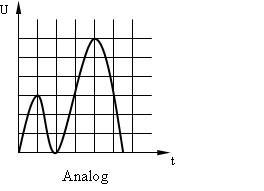
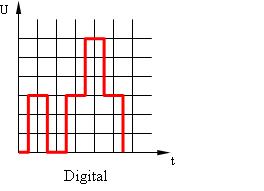
ZahlensystemeIn der Computertechnik gibt es drei wichtige Zahlensysteme: das dezimale, das binäre und das hexadezimale Zahlensystem.
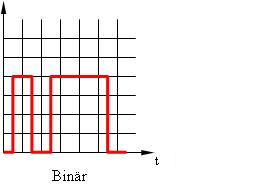
BitEin Bit (binary digit) ist die kleinste Informationseinheit (ein Schaltzustand pro Zeiteinheit) in einem Datenverarbeitungssystem. In der Elektronik kann diese Information nur den Wert 0 oder 1 bzw. „ja“ oder „nein“ haben. Zum Datenaustausch über CAN werden Informationen in einer festgelegten Weise strukturiert: Die grundlegende Informationseinheit ist das "Signal". Es kann unterschiedliche Wertebereiche umfassen: Wenigstens ein Bit, z. B. "Signal=1" bedeutet "Bremse betätigt" bzw. "Signal=0" bedeutet "Bremse nicht betätigt", aber auch 16 oder mehr Bit, z. B. für "Motordrehmoment" oder "Fahrzeuggeschwindigkeit". Für jedes Signal muss eine Übersetzung im "Data Dictionary" dem Wörterbuch des Herstellers, eindeutig festgelegt sein.
Bei zwei Bits gibt es
vier verschiedene Varianten. Jeder Variante kann eine Information zugeordnet
werden, die für alle Steuergeräte verbindlich ist. Als Beispiel dient der
Fensterheber im Türmodul. Kommt das Signal erstes Bit 0 V und zweites Bit
ebenfalls 0V vom Türmodul, so lautet die Information „Fensterheber befindet sich
gerade in Bewegung“.
Formel: Anzahl der Varianten = 2n (n = Anzahl der Bits) Beispiele von Signal Strukturierungen
1) Ein Motordrehmoment wird auf CAN
mit 12 Bit ($120) dargestellt, d. h. es sind ganze Zahlen von 0 bis 4095
möglich. Die Umrechnung in das reale Drehmoment erfolgt nach der Vorschrift:
Drehmoment = ((CAN-Wert x 0,25) 200) Nm
2) Signal "Aktueller Gang" des
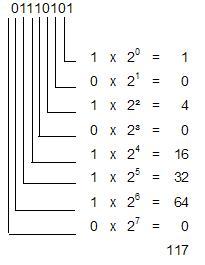
AT-Getriebes ($ 320-4 Bit): Mehrere Signale werden zu einem "Datenrahmen" (engl. Frame) zusammengefasst. Ein solcher Frame ist die kleinste Datenpackung, die über CAN verschickt werden kann. Ein Frame hat mindestens kein, maximal acht Datenbytes. Im Data Dictionary wird festgelegt, welche Signale der Frame enthält und wo sie angeordnet sind. Umwandeln des Binären Codes in eine Dezimalzahl
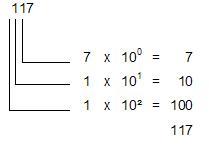
Binär codierte Dezimalzahl
Beispiel Umwandlung der Dezimalzahl 316 in eine binär codierte Dezimalzahl
Die binär codierte Dezimalzahl 316 besteht in diesem Fall
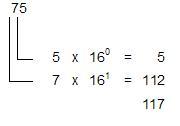
aus drei Zahlengruppen zu je vier Stellen. Die Basis für das Hexadezimalsystem ist 16. In einem Byte kann eine zweistellige Hexadezimalzahl codiert werden.
Wenn sich in einer Hexadezimalzahl ein
Buchstabe befindet, ist es einfach diese Zahl als Hex-Zahl zu erkennen. Bei
einer Zahl mit Ziffern ist das Erkennen einer Hex-Zahl nicht möglich. Für eine
eindeutige Zuordnung ist die Schreibweise einer Hex-Zahl mit einem h als Postfix
oder $ als Prefix versehen.
Ein Byteist aus acht Bits zusammengesetzt. Es lassen sich mit einem Byte 256 unterschiedliche Zeichen darstellen.
Die
Umrechnung entspricht nicht genau dem Faktor 1000, sondern dem Faktor 1024!
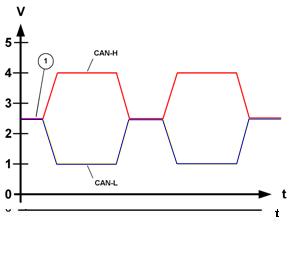
CAN nutzt eine
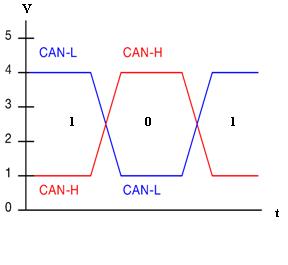
Non-return-to-zero-Codierung (NRZ).
Dabei wird einem Bit genau ein Zustand des Logikpegels zugeordnet,
low = 0 und high = 1. Mehrere gleiche Bits hintereinander erscheinen
auf dem Bus also als ein entsprechend längerer gleichbleibender
Pegel. Da bei CAN kein Takt übertragen wird, wird
grundsätzlich nach fünf gleichen Bits ein sogenanntes Stopfbit
(Stuffbit) eingefügt. Der Low-Pegel ist auf den CAN-Bus
dominant. Wenn auf den Bus gleichzeitig rezessive High-Pegel und
dominante Low-Pegel gesendet werden, erscheint auf dem Bus der Low-
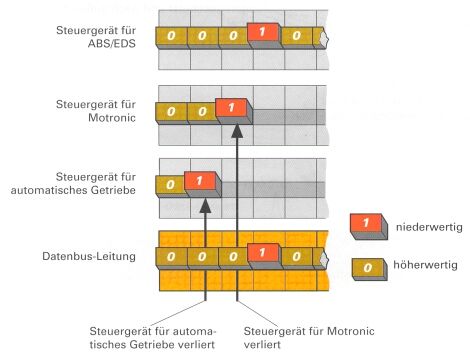
Pegel. Identifier und ArbitrierungIm CAN-Bus sind alle Teilnehmer gleichberechtigt, das bedeutet, dass bei einen zufälligen Zugriff auf den Bus jeder Teilnehmer, sobald der Bus frei ist, senden kann. Es wird ein nachrichtenorientiertes Protokoll gesendet. Ein Teilnehmer am CAN-Bus hat nicht, wie sonst üblich, eine Adresse. Zur Identifizierung von Nachrichten wird ihre Kennung, der Identifier gesendet. Das heißt, jede Nachricht kann von jedem Teilnehmer empfangen werden. Da der Zugriff auf den Bus zufällig erfolgt, kann es vorkommen, dass mehrere Teilnehmer gleichzeitig den Sendevorgang beginnen. Es muss entschieden werden, wer zuerst an der Reihe ist. Das Datenprotokoll mit der höchsten Priorität wird zuerst gesendet. So ist das Datenprotokoll vom Steuergerät ABS aus Sicherheitsgründen wichtiger als das vom Steuergerät Getriebesteuerung. Jedem Datenprotokoll ist entsprechend seiner Priorität im Statusfeld ein Code (Identifier), bestehend aus 11 Bits zugeordnet. Dabei hat jedes Bit einen Wert, dem eine Wertigkeit zugeordnet ist Der Identfier arbeitet auf der Grundlage der Dominanz des Low-Pegels. Die Teilnehmer senden den Identfier ihrer Nachricht, bis diese sich in einem Bit unterscheiden. Der Teilnehmer, der in diesem Augenblick einen rezessiven High-Pegel sendet, bemerkt, dass das von ihm gesendete Signal nicht dem entspricht, was nun auf dem Bus anliegt. Er beendet den Sendevorgang, bis der andere Teilnehmer das Übertragen seiner Nachricht abgeschlossen hat. Derjenige Teilnehmer mit dem kleineren Identifier hat die höhere Priorität und setzt sich durch und wird übertragen. Teilnehmer mit Nachrichten niederer Priorität, müssen ihre Botschaften anschließend erneut senden. Man dient diesen Vorgang Arbitrierung.Der Vorteil der sich daraus ergibt ist, dass Empfangsstationen hinzugefügt werden können, ohne Veränderungen an der Soft- und Hardware vornehmen zu müssen. Der 11 bits lange Identfier beim CAN ermöglicht 2048 verschiedene Nachrichten. Jeder Identfier darf nur einfach verwendet, das heißt von nur einem Teilnehmer gesendet, werden.
Signalpegel im CAN - Busam Beispiel von BMW
Bitzeit und ÜbertragungsrateDie Übertragungsgeschwindigkeit wird in Form der Übertragungsrate angegeben. Diese gibt die maximale Anzahl der übertragbaren Bits in einer Sekunde an. Somit ist die Einheit der Übertragungsrate "Bits pro Sekunde", also "bits/s". Für die Berechnung der Übertragungsrate spielt die Zeit, die ein einzelnes Bit für die Übertragung benötigt (die so genannte "Bitzeit") eine wesentliche Rolle. Da solche Bitzeiten nur Sekundenbruchteile betragen, wird die Bitzeit in "Mikrosekunden" (µs) angegeben. Eine Mikrosekunde ist bekanntlich der millionste Teil einer Sekunde. Wenn man die Bitzeit kennt, lässt sich die Übertragungsrate einfach berechnen: Übertragungsrate = 1 Bit / Bitzeit Quellen: VW, BMW, Multiplikator Lehrgang, BTZ Ingolstadt, Autor: Johannes Wiesinger
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
redaktionell bearbeitet: Johannes Wiesinger
geändert: 29.12.2022